Отчет о проектировании передней подвески
Добрый день, друзья!
Работая над системами третьего прототипа, особое внимание мы уделяем его подвеске. В процессе проектирования ставились задачи по возможности улучшить поведение автомобиля, применяя теоретические знания, результаты исследований и рекомендации авторов книг. В этой записи представлен отчет о ходе работы над передней подвеской предсерийного «Крыма».
Первоначально были изменены хода передней подвески, изначально отбой составлял 60 мм, а сжатие – 80 мм. Были приняты во внимание рекомендации по ходу передней подвески из книги «Шасси автомобиля» Й. Раймпеля:
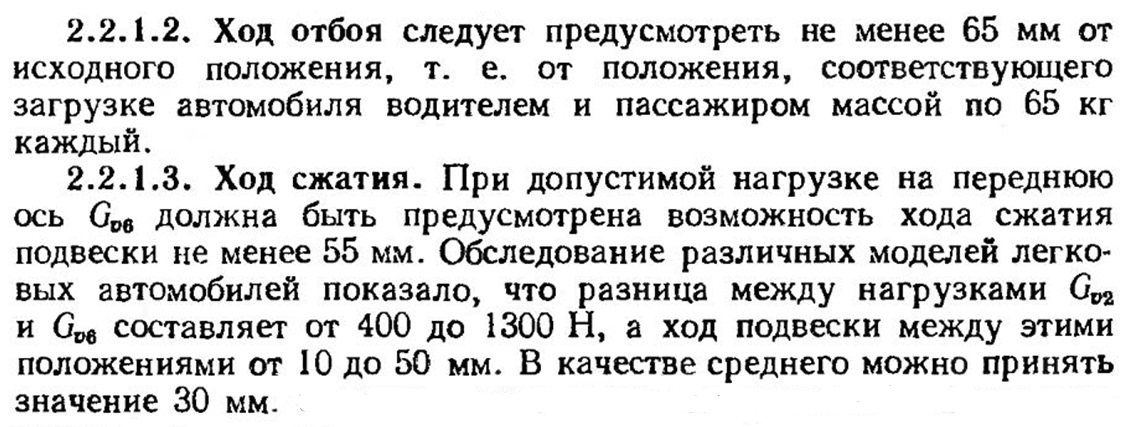
Так как автомобиль двухместный и изменение массы несущественное, то можно ориентироваться на минимальные хода 65 мм и 55 мм. В итоге проработки кинематики передней подвески был получен ход отбоя 65 мм, а ход сжатия – 70 мм.
Основным изменением в подвеске является изменение угла наклона стойки с 20 до 16 градусов. В нашем случае основным, что влияет на наклон стойки, является положение рейки. Можно было бы изменить положение скобы стойки, но этого не дает сделать чашка пружины.
Антиклевковая геометрия
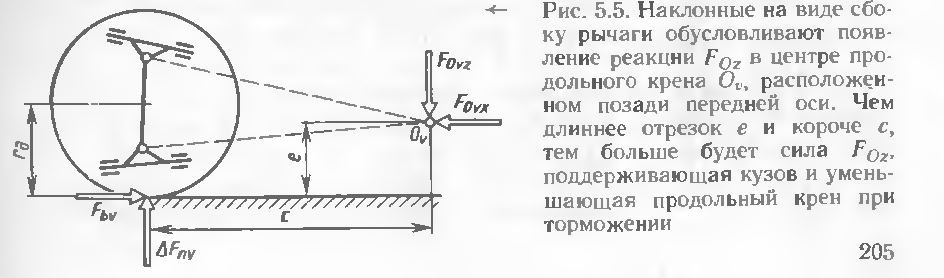
Чтобы минимизировать «клевки» при торможении автомобиля, нужно определить оптимальное положение центра продольного крена и его влияние на величину продольного крена. Для этого снова обратимся к рекомендациям Раймпеля:
Применительно к двухрычажной подвеске:
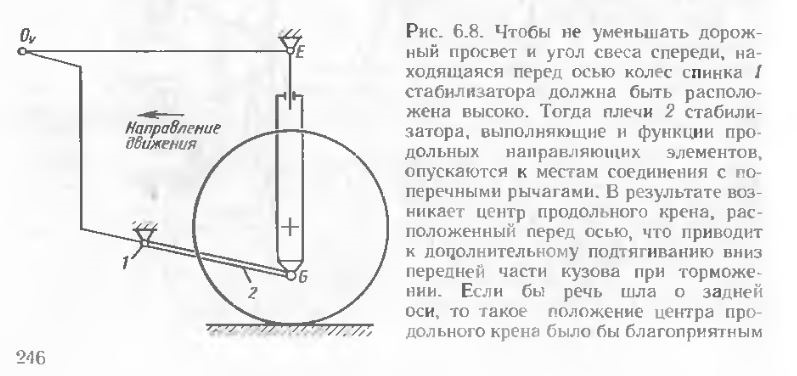
В случае, когда вместо продольного рычага используется стабилизатор:
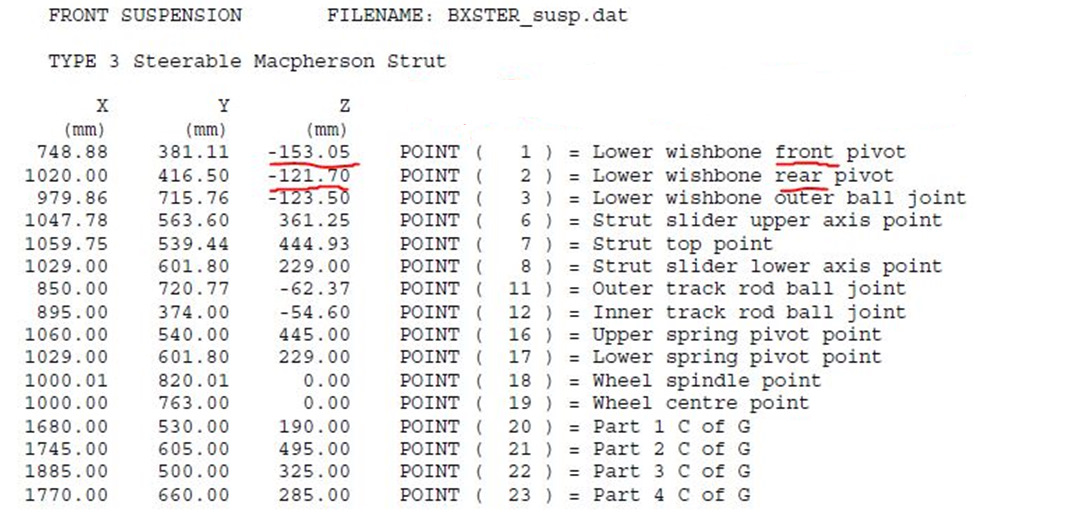
Таким образом, положение переднего шарнира нижнего рычага должно быть ниже по сравнению с задним шарниром. Именно так и расположены шарниры в передней подвеске Porsche Boxster:
Из-за большого угла кастера, а также необходимости поворота нижнего рычага возникает проблема – засечение шаровой опоры с корпусом. Данную проблему можно решить поворотом продольного рычага относительно поперечного, а также уменьшением угла кастера.
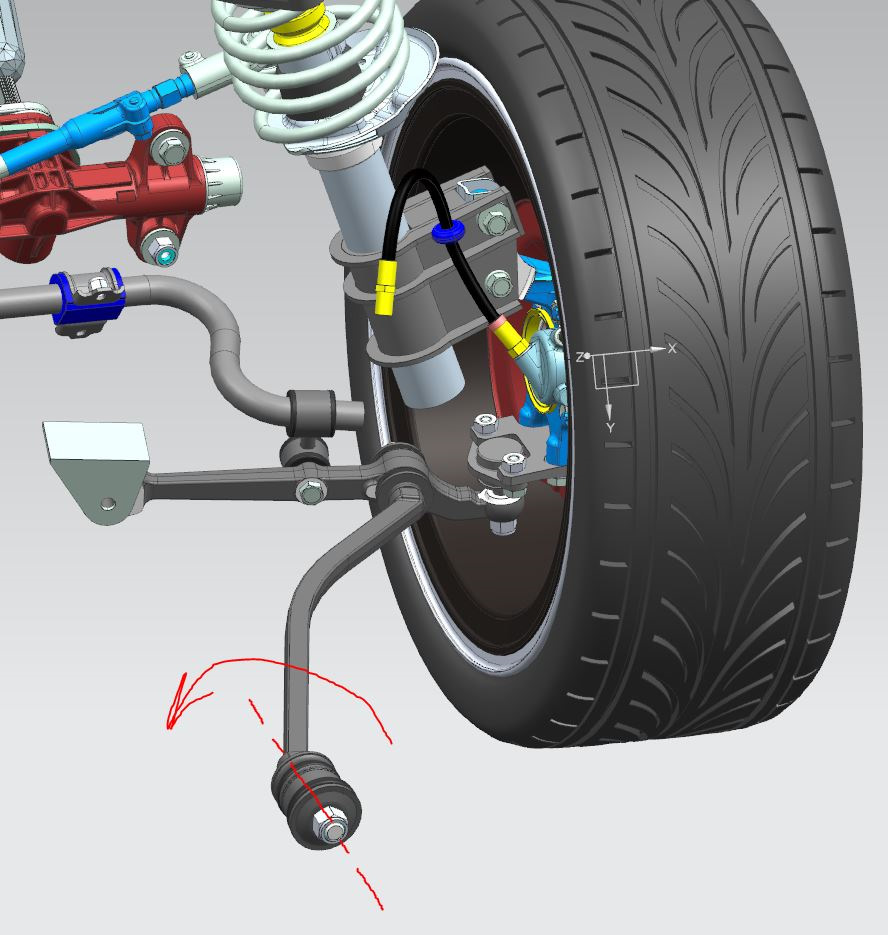
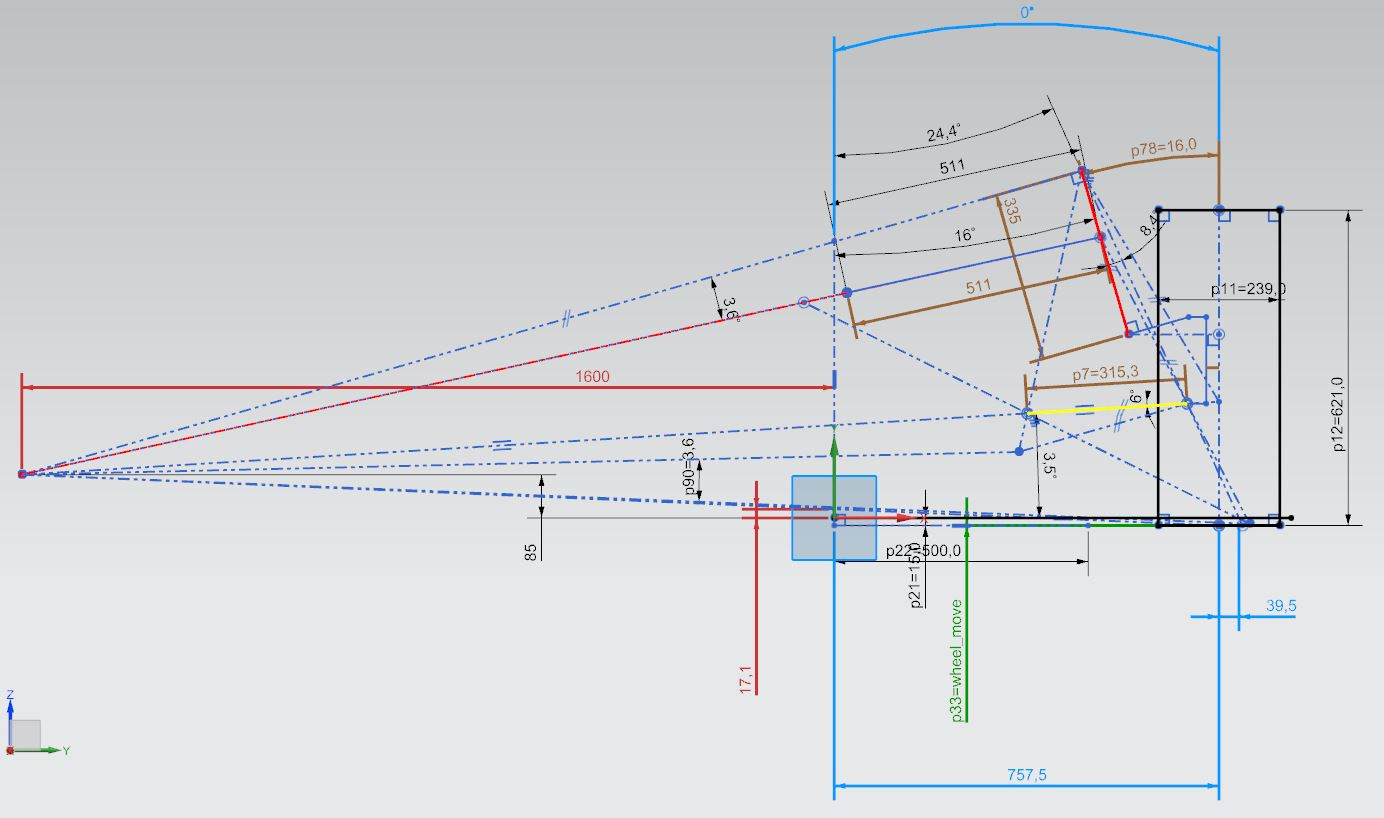
Исходное положение:

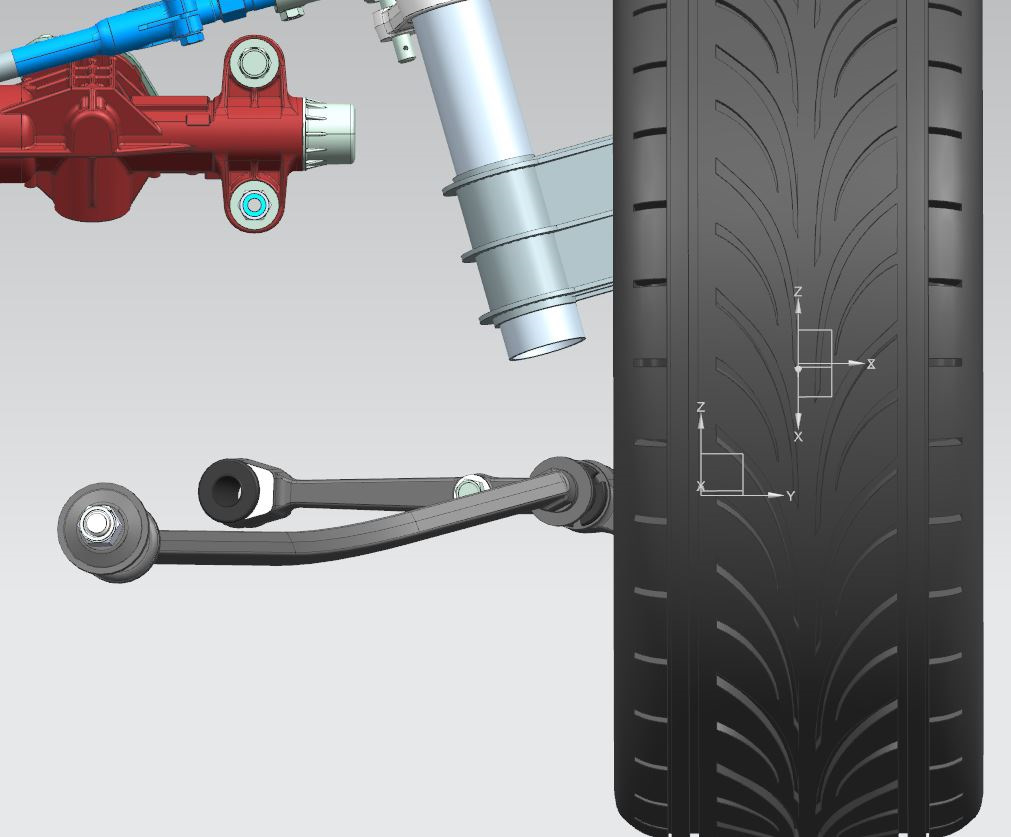
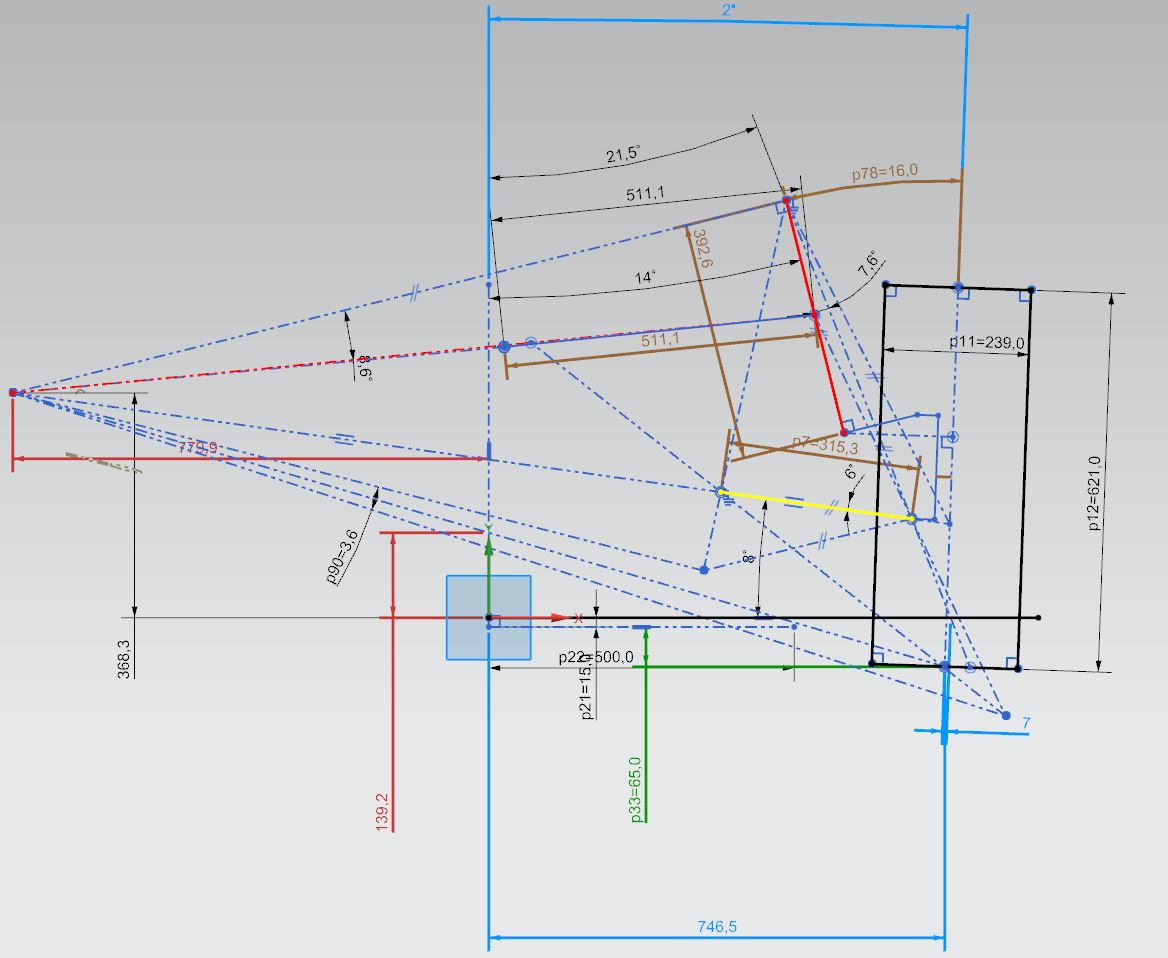
Конечное положение:
Проведем замеры углов, на которые изгибаются передний и задний сайлентблоки.

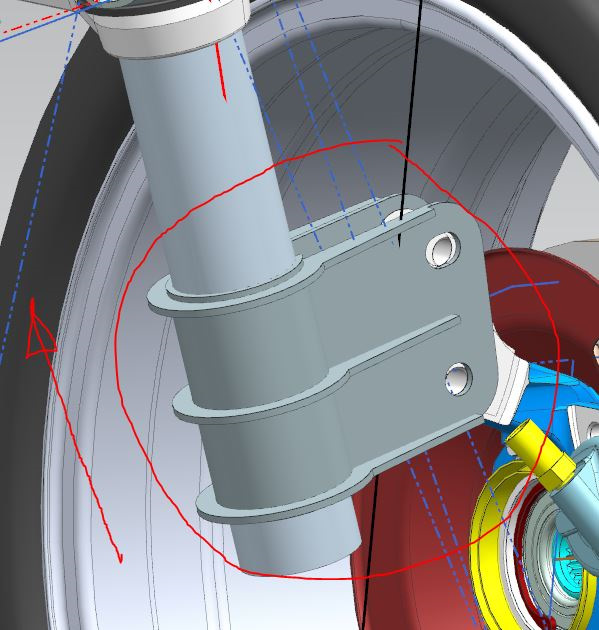
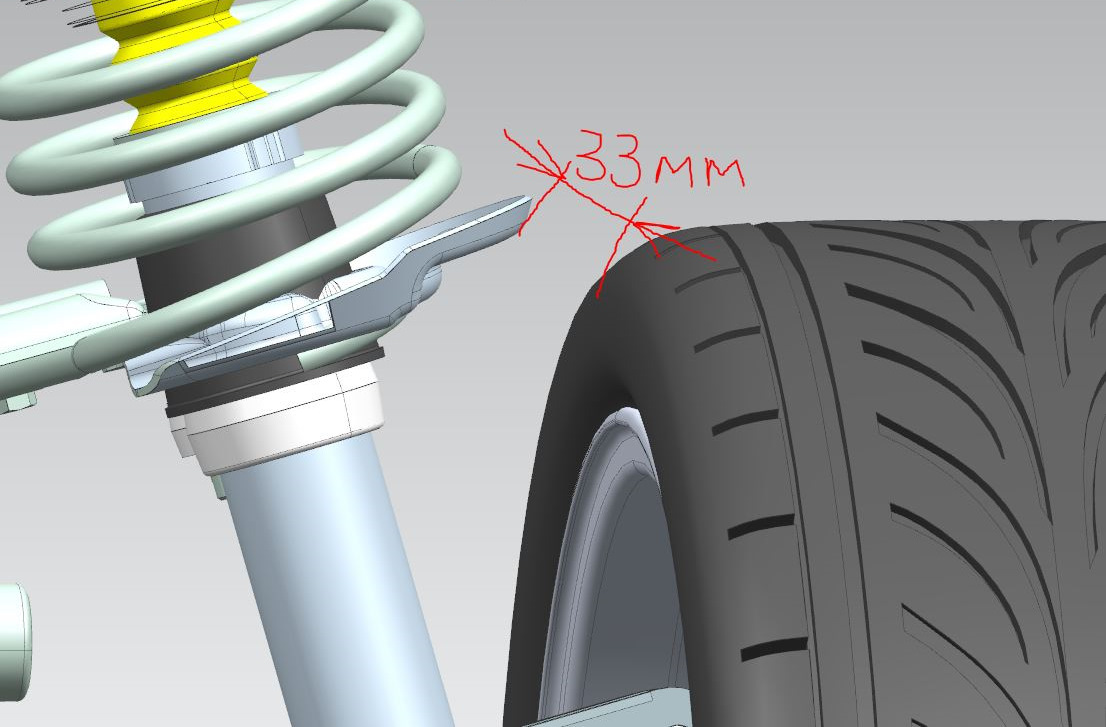
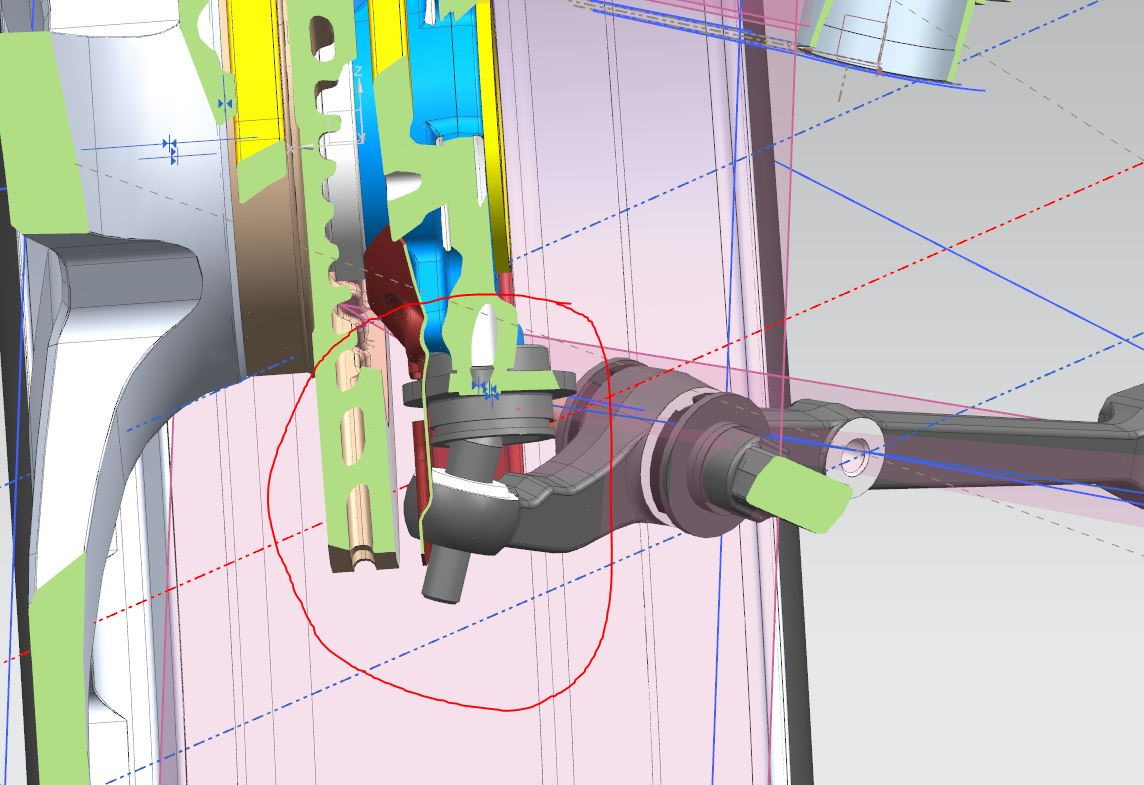
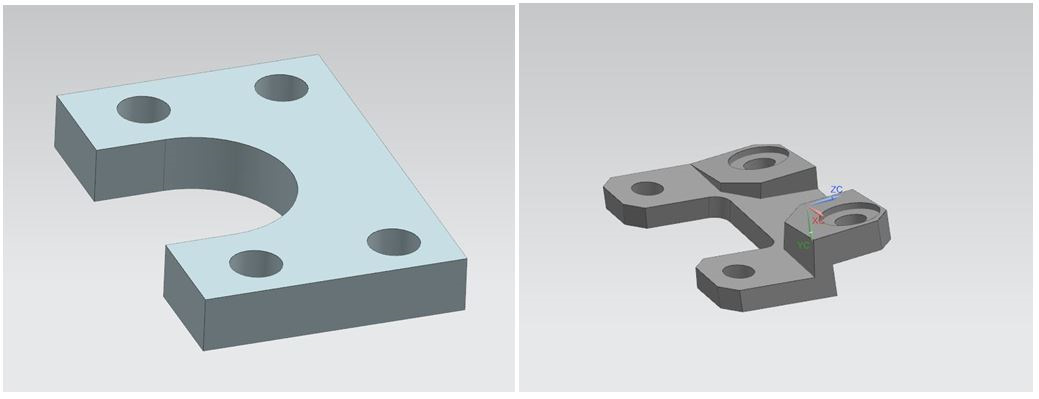
В положении полного сжатия подвески и при максимальном угле поворота шаровая опора цепляла тормозной диск, поэтому была необходима «проставка», которая «вынесет» шаровую опору.
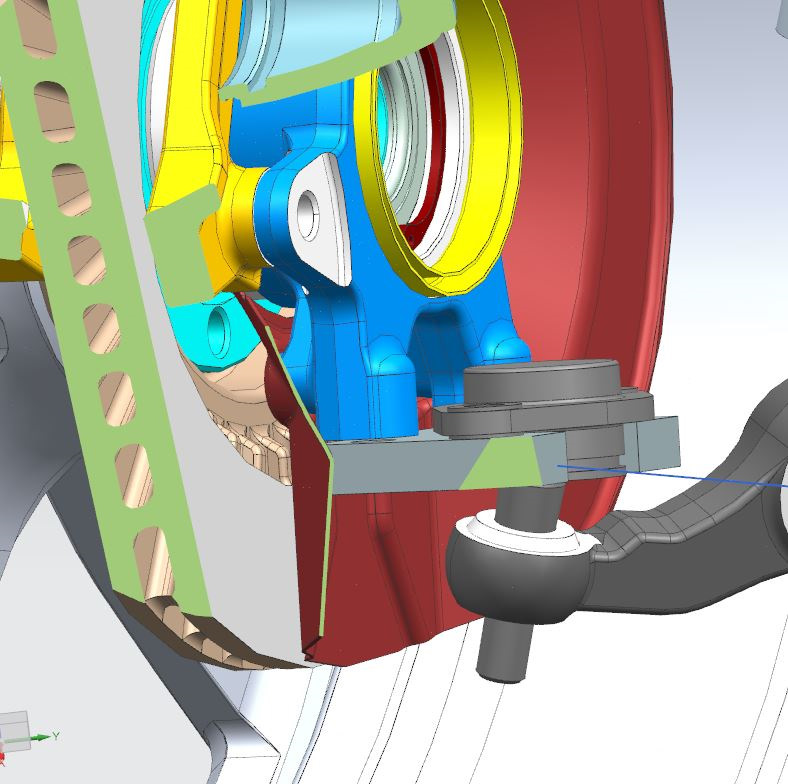
Спроектированная «проставка» решила проблему с засечением, а ее геометрия значительно упростилась. В дальнейшем необходимо уточнить толщину данной детали.
Кинематика подвески
Параллельно изменялась кинематика подвески для того, чтобы решить проблемы, указанные выше, а также для улучшения параметров при ходах подвески. Подбор параметров осуществлялся на основе исследования подвески Porsche Boxster. Главная цель изменения кинематики – уменьшить углы развала при ходах, уменьшить изменение колеи, увеличить колею до 1515 мм, подобрать положение стойки таким образом, чтобы углы схождения при ходах были минимальными.
Положение статики:
Положение отбоя (ход 65 мм):
Положение сжатия (ход 70 мм):

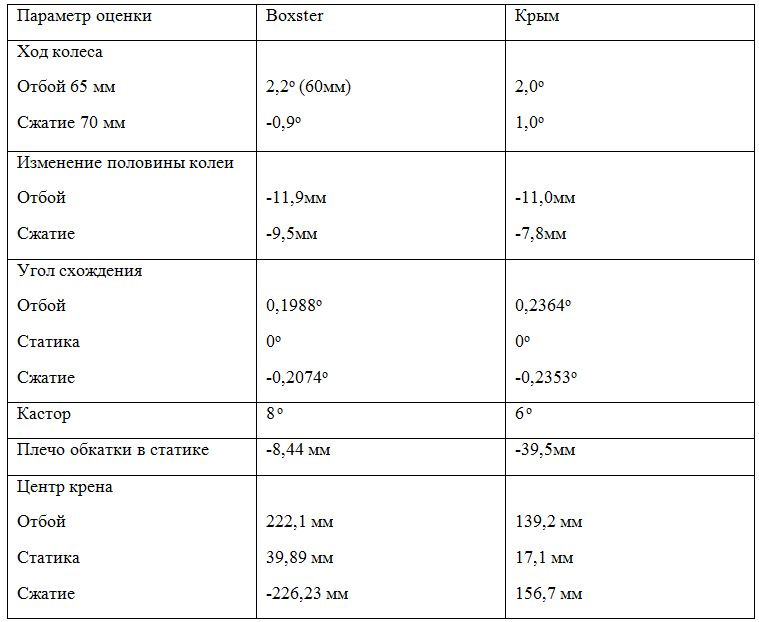
Далее было проведено сравнение параметров кинематики Boxster и Крыма.
Необходимый ход амортизатора – 392,6 — 266,8 = 126,2 мм. Ход стандартного амортизатора Калины составляет 183,6 мм. Уменьшить ход сжатия можно таким отбойником, установленным на штоке амортизатора:
Кинематика рулевого управления
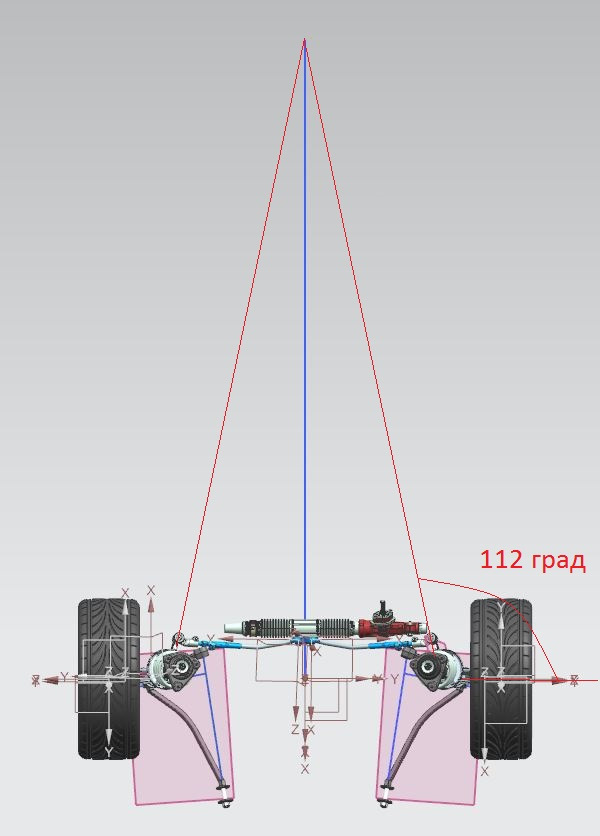
Следующим этапом после синтеза кинематики подвески и определения точки крепления боковой тяги является определение положения сошки. Положение сошки влияет на полюс поворота и соответственно на радиус поворота. В идеальном случае полюс находится на задней оси, тогда колеса передней оси катятся практически без скольжения.
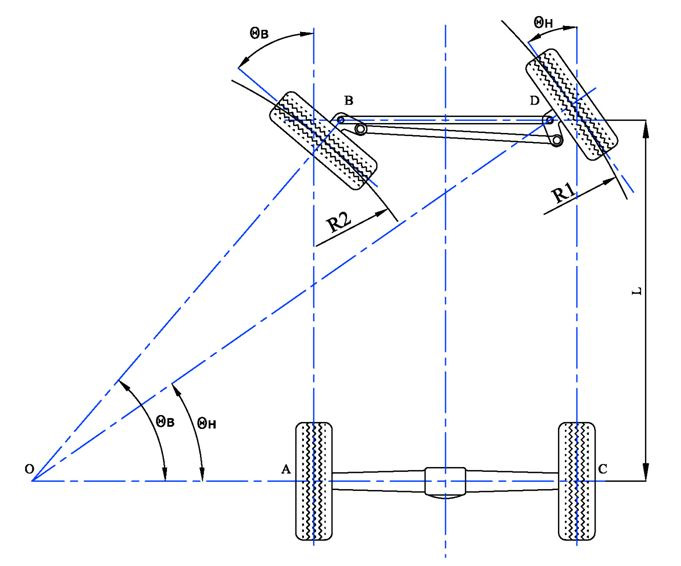
В учебном пособии «Системы управления поворотом специальных транспортных средств» Г.И. Гладов, А.Ю Морозова, 2004 говорится:
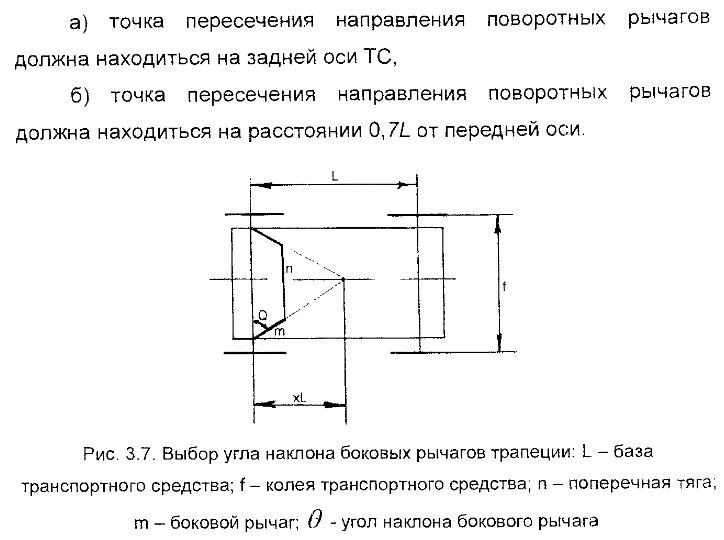
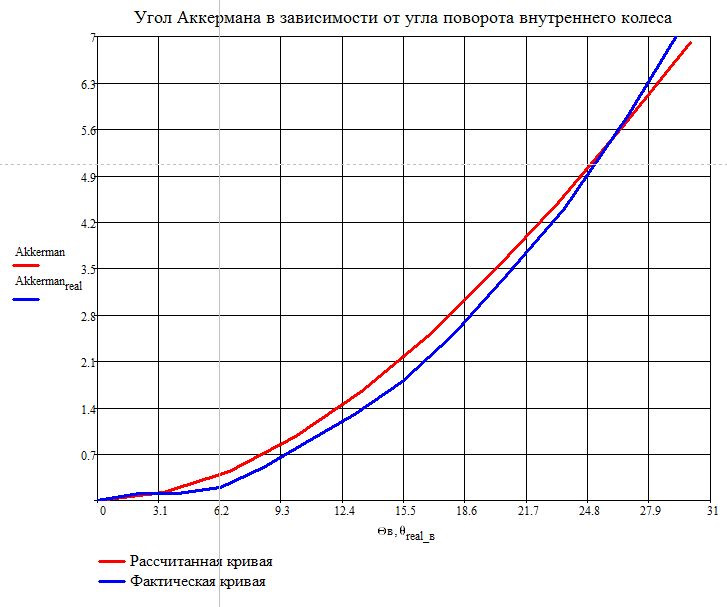
Рассмотрев несколько вариантов, когда эта точка находится в «базе» и за «базой», было определено, что оптимальное положение точки на малом расстоянии за «базой» автомобиля. Этому положению соответствует угол между плоскостью поворотного кулака и сошкой равный 112°. Для проверки были построены рассчитанная кривая по Аккерману требуемого изменения разности углов поворота колес и кривая фактического изменения этой разности. Как видно из графика, разность между рассчитанной и фактической кривой небольшая. Фактическая кривая находится под рассчитанной, это соответствует положительному схождению, что хорошо сказывается на устойчивости рулевого управления.